日本科学家为含噪量子反馈控制建立拓扑分类新框架
本文内容全由AI翻译,仅供参考
2026年3月6日——近年来,学界尝试将拓扑学概念引入量子反馈控制领域。由于量子系统的拓扑分类由对称性决定,一个关键问题是:量子系统在何种条件下能呈现特定对称性?然而在量子反馈控制的动态场景中,基于对称性和拓扑学的分类此前仅适用于理想投影测量情形。这意味着现有理论无法解释实验中的重要情况,如存在测量误差或多重测量与反馈操作相结合的场景。因此,更普遍场景下的分类问题始终是悬而未决的重要课题。
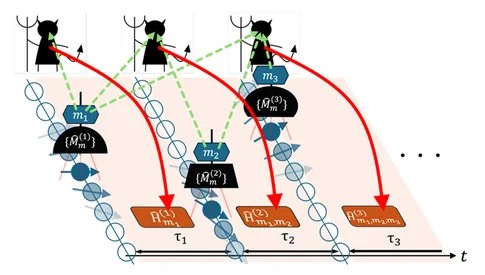
由东京大学工程研究生院应用物理系研究生温俊轩、龚宗平副教授和佐川 Takahiro 教授领导的研究团队证实:当包含误差的“裸测量”被多次执行并配合重复反馈控制时,可能的对称性仅限十种类型。裸测量不仅是比投影测量更普适的概念,更是量子测量的基础范式,因其能最大限度减少对量子态的扰动。该工作首次实现了含反馈重复测量场景下基于对称性的拓扑分类。研究还发现,若采用非裸测量手段,则可突破这十种对称性限制。
量子反馈控制既是量子技术的基石之一,也是麦克斯韦妖理论中利用信息提取能量的实现途径。这项研究揭示了实验可实现的量子反馈控制在对称性与拓扑结构上的强约束条件。相关成果有望为量子控制的设计原理——尤其是开发抗干扰噪声的量子技术——提供重要理论依据。