东芝与MIRISE合作成功在自主移动机器人上部署量子启发式优化计算机
2026年2月24日——东芝公司(Toshiba)与MIRISE科技公司(MIRISE)通过将东芝专有的量子启发优化计算机“模拟分叉机(SBM)”搭载于MIRISE研发的自主移动机器人,共同验证了先进控制技术在自主移动系统中的有效应用。
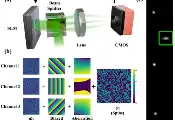
量子启发优化计算机采用源自量子计算的算法,可快速求解复杂组合优化问题。在车辆和移动机器人等自主系统中,如何在尺寸、功耗和成本的严格限制下实时处理日益复杂的信息成为巨大挑战。该团队基于SBM开发了多目标追踪算法,并利用专有电路设计技术将其部署于嵌入式FPGA芯片。MIRISE随后将该芯片集成至自主移动机器人,成功实现了实时自主导航演示。
虽然SBM等量子启发优化计算机此前已用于移动系统的集中控制,但将其直接嵌入移动平台并应用于自主控制尚属全球首次。相关成果已发表于《自然-通讯》等三份学术期刊。
在劳动力短缺的驱动下,物流和智慧出行等领域对自动驾驶车辆及自主移动机器人的需求激增。这些系统需在短控制周期内实时完成“环境感知”(通过摄像头与激光雷达检测路径障碍)和“决策规划”(行动方案制定),同时满足严苛的尺寸、功耗与成本限制。平衡高性能处理与硬件约束已成为关键技术瓶颈。
该研究团队基于SBM开发了嵌入式原型平台,其核心是新型多目标追踪算法。该算法利用SBM的大规模高速搜索能力,不仅能处理传统一对一匹配,还可识别潜在的一对多关联关系,使被遮挡物体的准确识别成为可能。评估显示:在标准测试中追踪准确率提升4%,在专门设计的遮挡场景测试中提升达23%。
通过专有电路设计技术,研究人员在性能受限的嵌入式FPGA上实现了每秒23帧的处理速度,远超自动驾驶通常所需的10帧标准。这使得原本需要高性能服务器的优化计算得以在车载系统等紧凑型设备上实时运行。
搭载该算法的FPGA芯片在MIRISE开发的自主移动机器人上成功演示了动态避障路径规划。通过分析SBM提供的物体位置置信度与运动方向,系统能动态调整障碍物占据区域并预测未来位置,减少不必要的避让动作。在静态与动态物体混合的复杂环境中,机器人仍可实时选择最优路径。